simulation
SARGE 0.1.8 Released
10/08/08 15:23
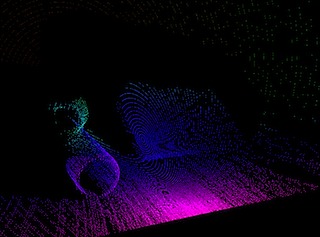
OK I just uploaded v. 0.1.8 which includes a few bug
fixes, terrain shadows, and most importantly the
Canesta range camera on the ATRVJr. It is deactivated
by default because it uses a ton of bandwidth. Also
get SARGEController 1.5 which includes functions to
use the Canesta sensor.
Now with 100% more Packbot!
14/02/08 12:36
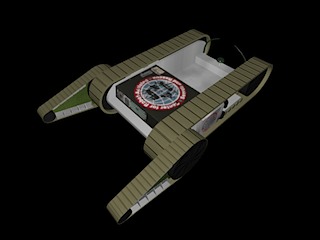
One More Thing...
03/01/08 16:36
SARGE can handle well over 30 robots, remotely
controlled, simultaneously. In the screen shot
here I'm running 30 ATRV-Jr.'s following a waypoint
trail. They look like ants from up here.


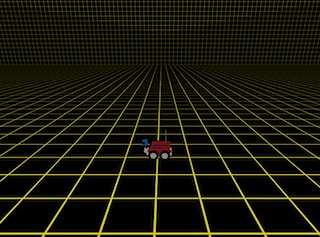
New "Holodeck" Level
31/07/07 13:06
I've been wanting to do this for a while so yesterday
I whipped up a level that looks like the ST:TNG
holodeck.... only huge (100m x 100m x 100m). It is
available on the SourceForge downloads page along
with the updated source files. The ATRVJr takes
network commands and sends back GPS, SICK, Compass,
and IMU data. Connect via TCP on port 9349.
Spinny Laser
07/06/07 20:09
The simulated spinning laser is now working quite
well. I've improved the speed of SARGE when
using it quite a bit now, though I'm not done
exploring a few more optimization options.
Anyway here's a screenshot. I'll post a
new project file with these enhancements soon as well
as the visualization tools to use with it.